지난 시간에 최근 출시된 쏘나타 HEV(Hybrid Electric Vehicle) DN8 차량의 현대차의 최첨단 ADAS(Advanced Driver Assistance Systems)에 대해 개념에 대해 간단하게 알아보았다.
이 시스템을 가능케 하기 위해서는 전방 레이더, 전방 카메라, 후측방 레이더, 후방 카메라, PDW 센서 등 여러 가지 장치들이 필요한데 이번 시간에는 전방 레이더와 전방 카메라에 대해 알아보고 그것의 작동 방법, 개념 등을 알아보고자 한다.
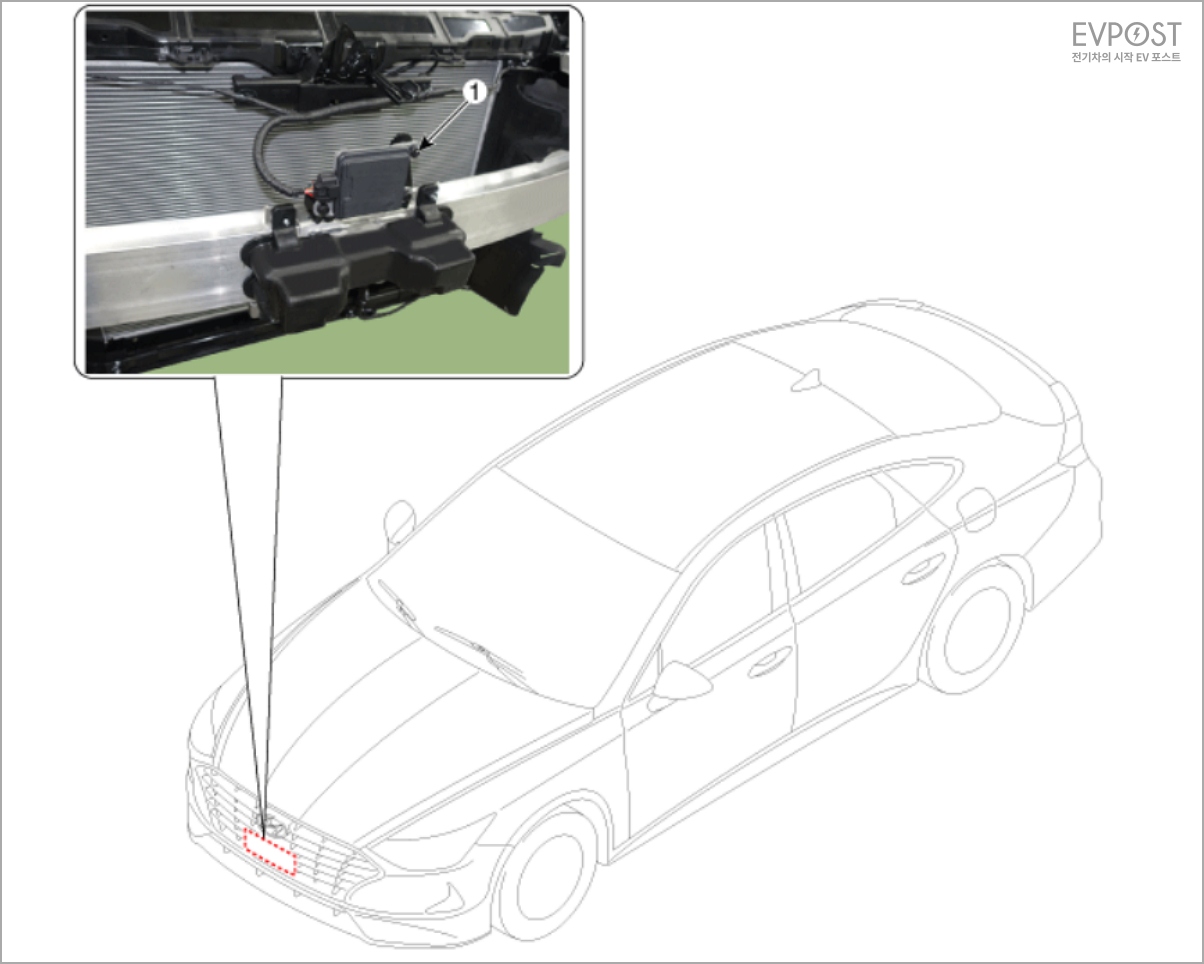
| 전방 레이더 시스템
전방 레이더가 관여하는 기능에는 F.C.A(Forward Collision-avoidance Assist-전방 충돌 방지 보조),SCC(Smart Cruise Control-스마트 크루즈 컨트롤), AEB(autonomous emergency braking-급제동 보조) ,HDA(Highway Driving Assist-고속도로 주행보조) 등이 있다.
F.C.A(Forward Collision-avoidance Assist-전방 충돌 방지 보조)는 운전자의 주의 산만과 같은 요인으로 제동 시점이 늦어지거나 제동력이 충분히 확보되지 않아 발생할 수 있는 사고에 대한 충돌 회피 또는 피해 경감 목적으로 하는 기능이다.
전방 감지 센서(전방 레이더, 전방 카메라)를 이용하여 도로의 상황을 파악하여 위험 요소를 판단, 운전자 경고 및 비상제동을 수행하여 충돌을 방지할 간 충돌 속도를 낮추는 것으로서 안전운전에 도움을 준다.
- 1단계 : 충돌 위험이 감지되면 시각(Display) 경보 및 음성 경보를 수행한다.
- 2단계 : 충돌 위험이 높아지면 엔진 토크 저감 및 자동 제동을 수행한다.
- 3단계 : 충돌 위험시 긴급제동을 수행한다.
- 자동 제동 완료 후 일정 시간 제동력을 유지한 후 제동 제어를 해제한다.
FCA의 참고사항으로는 제동력은 충돌 위험도에 따라 다르게 발생하나 최대 작동 속과를 초과하거나 핸들을 급격히 꺾는 등 회피 기동을 인지할 때, 기어 위치가 R, P 단일 때 가속 페달을 60% 이상 밟았을 때는 운전자의 회피기동으로 인지하는 순간 자동제어는 즉시 해제된다.
SCC(Smart Cruise Control-스마트 크루즈 컨트롤)은 운전자가 설정한 속도와 차간 거리를 유지하면서 자동 주행을 할 수 있게 도와준다 이것의 상세한 기능으로는
- 정속 주행 : 전방 차량이 없으면 운전자가 설정한 속도로 정속 주행을 한다.
- 감속 제어 : 설정 속도보다 속도가 느린 전방 차량이 감지되면 감속 제어를 한다.
- 가속제어 : 전방 차량이 사라지면 설정된 속도로 다시 가속되어 정속 주행을 한다.
- 차간거리 제어 : 설정된 거리 단계에 따라 전방 차량과 거리를 유지하면 전방 차량과 같은 속도로 주행한다.
- 정체구간 제어 : SCC 기능으로 일정 거리를 유지하던 전방 차량이 정차를 하게 되면 전방 차량 뒤에 정차를 하고, 전방 차량이 출발하면 다시 거리를 유지하며 따라간다. 단! 정차 후 3초 이후에는 가속 페달을 밟거나 RES+또는 SET-버튼을 누르면 재출발


이 유닛은 시스템이 제한되는 경우도 생길 수 있는데 유닛에 이물질에 오염된 경우, 카메라 앞 유리에 짙은 선팅이나 심한 오염(스티커, 벌래) 등이 있을 경우, 도로환경(가드레일 그림자, 흐린 차선) 및 날씨(악천후, 직사광선)이 좋지 못할 경우, 앞에 있는 대상이 너무 작거나 큰 경우, 도로면의 물기로 인해 태양광, 가로등 또는 마주 오는 차량의 불빛이 반산 되는 경우, 전방 차량에 후미등이 없거나 후미등이 켜지지 않았을 때, 또는 후미등이 비정상적으로 위치했을 경우, 차량 앞 유리 습기가 완전히 제거되지 않은 경우에는 시스템이 정상적으로 작동하지 않을 수 있다.
쏘나타(DN8) HEV 차량에 적용된 스마트 크루즈 컨트롤에는 커브에서의 기능 및 성능이 향상되었는데 커브에서 빠른 속도로 설정되어 있으면 차량이 옆으로 밀리는 경우가 발생하므로 커브에서는 전방 차량이 없더라도 속도가 줄어든다. 그러나 직선도로에서 선행 차량을 추종하다 선행차량이 커브에 진입하면 나의 차량은 목표 속도를 추종하기 위해 가속할 수도 있다.
커브에서 전방 차량을 추종 제어하다가 선행 차량이 사라지면 가속을 제한하여 곡선으로 안전속도를 유지하거나 설정속도가 곡선으로 안전속도보다 작으면 설정속도를 유지한다. 이유는 가속을 해서 거리가 가까워지면 다시 감속을 하는 등 반복적인 가/감속을 방지하기 위해서이다(이 경우에도 스마트 컨트롤 차량이 차선을 바꾸거나 운전자가 악셀 페달을 밟으면 사고하게 된다.)
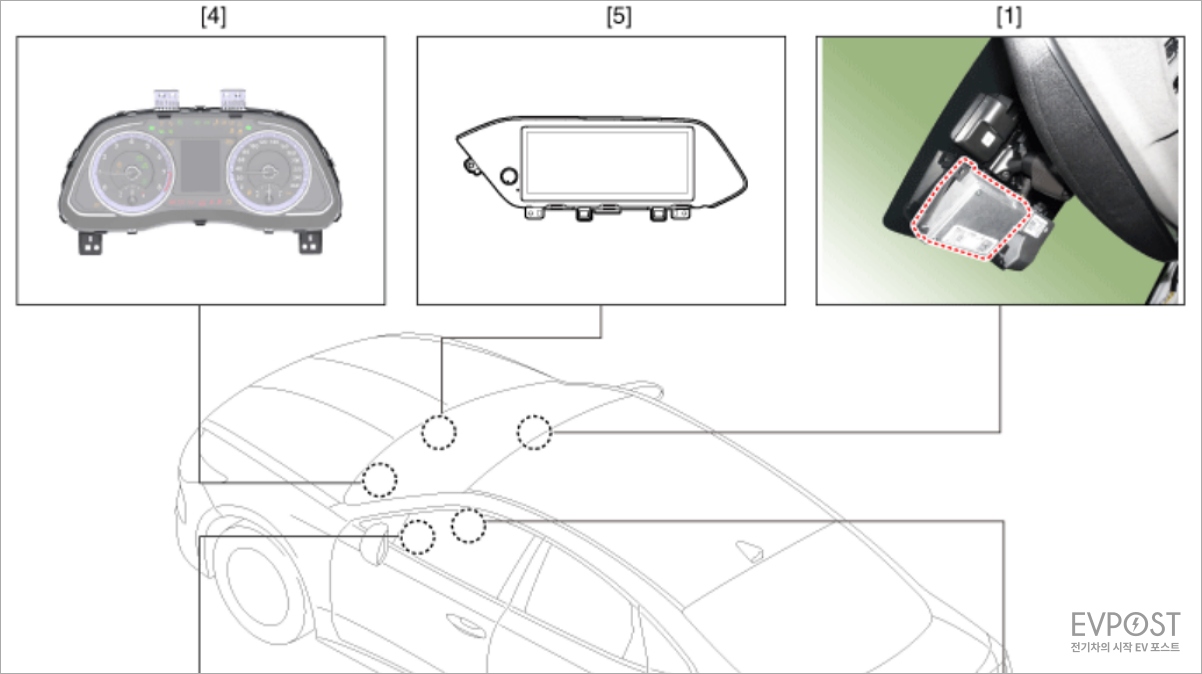
| 전방 카메라 시스템
이 유닛 역시 전방 레이더와 같이 시스템이 제한되는 경우는 동일하다. 전방 카메라는 FCA(Forward Collision-avoidance Assist-전방 충돌 방지 보조),LKA(Lane Keeping Assist-차로 이탈 방지 보조),DAW,(Driver Attention Warning-운전자 주의 경고) HBA(High Beam Assist-하이빔 보조),HDA(Highway Draving Assist-고속도로 주행보조),LFA(Lane Following Assist-차로 유지 보조)의 기능을 할 수 있게 도와주는 유닛이다.
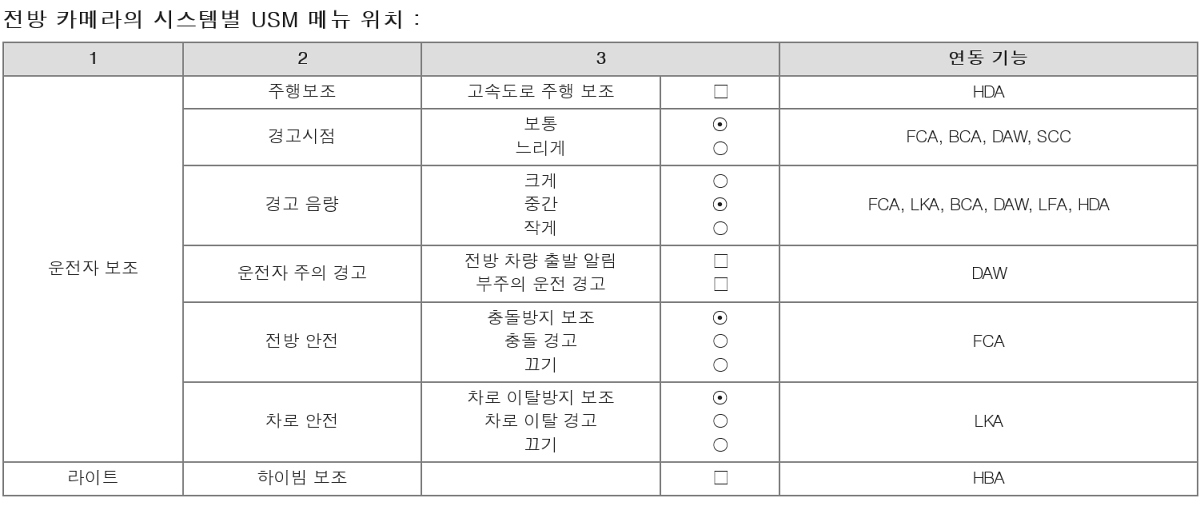
전방 카메라가 관여하여 시스템이 작동하기 위해서는 시스템별 작동 속도, USM(User Setting Mode) 별 메뉴 위치가 정해져 있는데 그 조건은 아래와 같다.
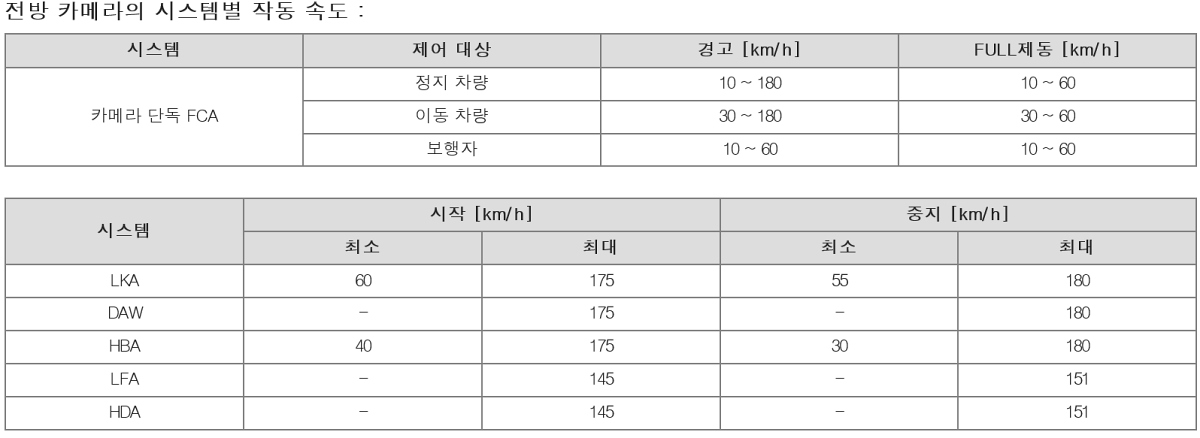
 상기 해당 기능의 USM이 켜져 있고, 작동 속도를 만족한 상태에서 전방 카메라 시스템별 작동 조건은 아래와 같다.
상기 해당 기능의 USM이 켜져 있고, 작동 속도를 만족한 상태에서 전방 카메라 시스템별 작동 조건은 아래와 같다.
1.FCA(Forward Collision-avoidance Assist-전방 충돌 방지 보조)
• ESC(차체자세 저 어장치)는 켜져 있어야 하고 전방에 충돌이 예상되는 차량이나 보행자가 감지됐을 때
2.LKA(Lane Keeping Assist-차로 이탈 방지 보조)
• 차선이 명확하게 인식되고 양쪽 차선 모두 감지되어야 한다.
• 운전자의 손은 운전대에 위치하고, 조향 보조 중 조향력을 무시하는 경우 시스템을 해제한다.
• 방향지시등과 비상등 시위치가 OFF된 상태에서 임의로 차로를 변경할 경우 작동한다.
• 차량이 차로 폭의 일정 이상을 넘어갈 경우 차로 변경을 위해 차로를 이탈하는 것으로 판단하여 시스템을 해제한다.
• 급격한 곡선으로를 주행하는 경우, 급격한 제동 또는 급격한 차선을 변경하는 경우, ESC(electronic stability control) / VSM(Vehicle Stability Management), 기능이 작동하는 경우, 차로 폭이 너무 넓거나 좁을 경우 이 시스템은 작동하지 않을 수 있다.
3.DAW,(Driver Attention Warning-운전자 주의 경고
• 의도적인 차선 침범이 빈번하거나 과격하게 운전한 경우, 심한 커브나 노면이 고르지 않은 경우, 차로 이탈 방지 보조 등ㄱ과 같은 ADAS 기능에 의해 차량이 제어되는 경우에는 운전자 주의 경고 시스템이 작동하지 않을 수 있다.
4. 전방 차량 출발 알림 기능
• 정차 중에 전방 차량이 출발하면 알림음과 함께 계기판에 문구가 표시되는 기능이다.
• 보행자 또는 자전거가 앞에 있는 경우, 전방 차량이 급출발, 유턴하거나 끼어든 경우, 과속방지턱, 경사로, 갓길, 휴게소, 주차장에서 정차한 경우, 우회전 또는 곡선으로 주행 중 정차한 경우, 차로 수가 줄어드는 길 등 전방 상황이 복잡한 경우에는 시스템이 작동하지 않을 수 있다.
5.HBA(High Beam Assist-하이빔 보조)
• 조명 스위치를 ‘Auto’위치로 돌리 후 계기판 방향으로 밀어서(상향등 ON) 작동시킨다.
• 다음과 같은 상황에서는 자동으로 상향등이 꺼진다. 다가오는 차량의 전조등이나 앞서가는 차량의 미등을 감지할 때, 자전거 및 이윤 차의 전조등 또는 후미등을 감지할 때, 전조등을 상향으로 하지 않아될 만큼 주위가 밝을 때, 전방에 가로등이나 기타 조명이 있을 때, USM이 꺼져 있거나 작동 속도를 만족하지 못할 때, HBA 작동 조건을 만족하더라도 주간 시간대에는 작동하지 않는다.
6.LFA(Lane Following Assist-차로 유지 보조)
• 차량이 차로 안쪽에 있고, 양쪽 차선 모두 인식된 상태에서 운전자의 급격한 조향이 없을 경우 작동
• 차선이 인식되지 않는 경우, 선행 차량의 존재 여부와 선행 차량의 주행 상태에 따라 제한적으로 조향을 보조한다.
• 운전자가 지속적으로 운전대에서 손을 놓고 주행하면 핸즈 오프 경고가 발생하며, 핸즈 오프 경고 발생 중에도 계속 운전대를 잡지 않으면 시스템은 해제된다.(매우 위험하다.)
• 급격한 곡선으로를 주행하는 경우, 급격한 제동, 차선 병경을 하는 경우, ESC, VSM 기능이 작동하는 경우, 차로 폭이 너무 넓거나 좁은 경우네는 작동하지 않을 수 있다.
7.HDA(Highway Draving Assist-고속도로 주행보조
• 고속도로를 주행 중이고 스마트 크루즈 컨트롤 기능을 켠 상태에서 고속도로 본선에 진입하면 자동으로 작동한다. HBA 작동 중에 차로 유지 보조 버튼을 누르면 시스템은 해제된다.
• HDA 작동 조건을 만족하고 운전자의 설정 속도와 고속도로 제한 속도가 일치하면 자동 속도 설정 모드로 진입한다.(설정 속도 및 ‘AUTO’심벌 초록색 표시, 알람을 발생)
• 고속도로의 제한 속도가 바뀌는 구간에서 알림음과 함께 변경된 제한 속도로 설정 속도가 자동으로 변경된다. 운전자가 임의로 설정속도를 변경하면 ‘AUTO’심벌이 사라지고 자동 속도 설정 모드가 해제된다.
• 고속도로 주행 중에는 IC, JC 등 본선으로 벗어나거나 오픈형 톨게이트가 있는 경우, 내비게이션 지도 정보를 업데이트하지 않은 경우, 내비게이션이 동시에 여러 기능을 수행하여 과부하로 인한 지도 정보를 미수신 한 경우, 지도 데이터의 오차로 인해 실제 도로와 다르거나 GPS 신호가 수진 되지 않은 경우, 운전자가 안내 경로와 다르게 중행하고 경로 재탐색이 자동으로 일어나지 않는 경우에는 정상적으로 작동하지 않을 수 있다.
이렇게 전방 레이더와 전방 카메라에 대해 알아 보았다. 다음시간에는 후측방 레이더 시스템과 후방모니터,PDW센서등을 알아보고자 한다.
![]() 마키님
마키님
전기차에 관심이 많은 코나 EV 유저




