 지난 시간까지 ADAS(Advanced Driver Assistance Systems)에 대해 알아보았다. 그중 서라운드 뷰 시스템도 포함이 되어 있는데 최근 출시된 쏘나타(DN8) HEV(Hybrid Electric Vehicle)의 인스퍼레이션 트림에서(최상위트림) 플레티넘 패키지를 선택하면 이 기능이 포함되어 있다. 이런 기능에 대해서 차량을 구매하고 사용자 매뉴얼을 둘러보다 보면 처음에는 보아야 할 부분이 많아 한번 보고는 이해하기가 힘들어 몇 번을 다시 읽어야 한다.
지난 시간까지 ADAS(Advanced Driver Assistance Systems)에 대해 알아보았다. 그중 서라운드 뷰 시스템도 포함이 되어 있는데 최근 출시된 쏘나타(DN8) HEV(Hybrid Electric Vehicle)의 인스퍼레이션 트림에서(최상위트림) 플레티넘 패키지를 선택하면 이 기능이 포함되어 있다. 이런 기능에 대해서 차량을 구매하고 사용자 매뉴얼을 둘러보다 보면 처음에는 보아야 할 부분이 많아 한번 보고는 이해하기가 힘들어 몇 번을 다시 읽어야 한다.
읽어야 할 정보가 많은 것에 비해 쏘나타(DN8) HEV 차량의 사용자 매뉴얼에서는 서라운드 뷰 시스템에 대해서 비교적 짧은 설명만 되어 있다. 그래서 이번 시간에는 쏘나타(DN8) HEV에 포함되어 있는 서라운드 뷰(SVM-Surround View Monitor) 시스템에 대해 알아보고자 한다.
| 서라운드 뷰(SVM-Surround View Monitor) 시스템
서라운드 뷰 모니터(SVM) 시스템은 차량 주변 360도 상황을 차량 위에서 내려다 본 듯한 화면을 실시간 영상으로 제공해주는 주차 보조 시스템이다. 서라운드 뷰 또는 어라운드 뷰(AVM-Around View Monitor)처럼 각 차량 제조 회사마다 부르는 명칭이 약간씩 다를 뿐 하는 기능은 같다.
차량의 전방. 양 측면, 후방에 각 개씩(총 4개)의 카메라로부터 입력되는 영상을 왜곡 보정하여 시점 변화 및 영상 합성기술을 기반으로 자신의 차량 주변을 조감도 형식으로 위에서 아래로 내려다 본 영상 및 다양한 뷰 모드를 제공한다.
 이 시스템의 목적은 주차 및 저속 운행 시 차량 주변의 영상을 운전자에게 제공하여 차량 운행의 안정성과 편의성을 향상시키는 것을 목적으로 하며, 최종 화면이 표출되는 원리는 다음과 같다.
이 시스템의 목적은 주차 및 저속 운행 시 차량 주변의 영상을 운전자에게 제공하여 차량 운행의 안정성과 편의성을 향상시키는 것을 목적으로 하며, 최종 화면이 표출되는 원리는 다음과 같다.
- 190도를 투영할 수 있는 카메를 통해서 4개의 영상을 SVM 제어기에 전송한다.
- SVM 유닛은 카메라로부터 전송받은 4개의 영상을 굴곡 현상이 없도록 보정 작업을 한다.
- 보정된 4개의 영상을 합성하여 차량 모니터를 통해 운전자에게 전달한다.

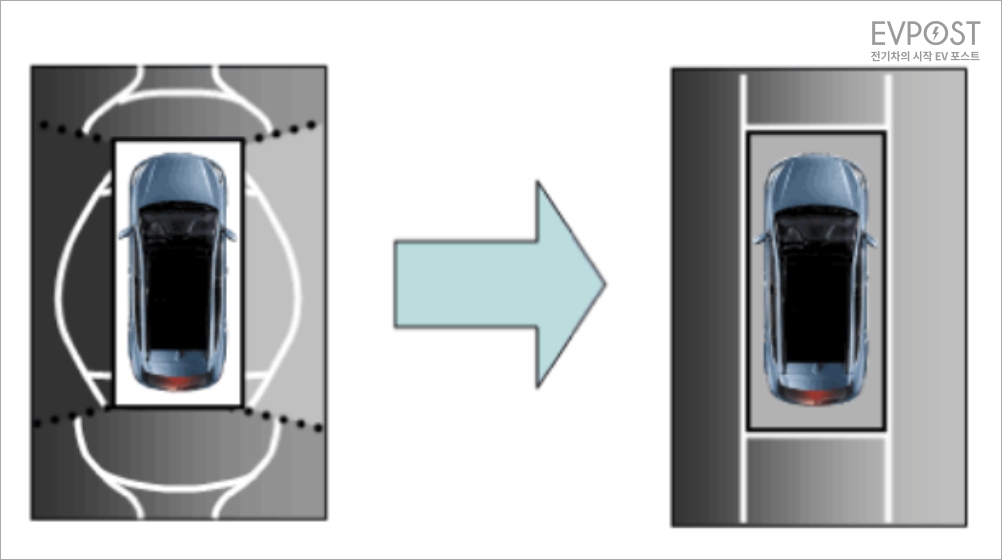
SVM의 모드에 진입 조건이 있는데 모드 진입 후에도 주기적으로 차량 정보를 판단하여 조건이 만족할 경우 전방 모드에서 후방 모드로 전환이 가능하며 역전한 도 가능하다. 모드전환 시 조건에 따라 화면에 표시되는 뷰는 초기 뷰 또는 이전 단계의 뷰가 출력된다.
전환하려는 모드가 최초 진입의 경우 전/후방에 따라 설정된 초기 뷰를 출력하며, 주차 시 전. 후진이 반복되어 연속적인 전후방 모드 전환이 발생하는 경우(재진입)를 위해 전단계의 화면에 출력되고 있었던 뷰를 기억하여 출력한다.
SVM 모드가 해제되는 경우는 전방 모드 일시 SVM 스위치 ON상태에서 차 속이 15Km/h 이상이 되면 자동 해제된다. 후방 진입 모드 일시는 R 단을 제외한 기어 상태가 되면 자동 해제된다. 그리고 SVM은 사용자의 편의성을 고려하여 사용자가 선택할 수 있는 3가지 옵션을 제공한다.
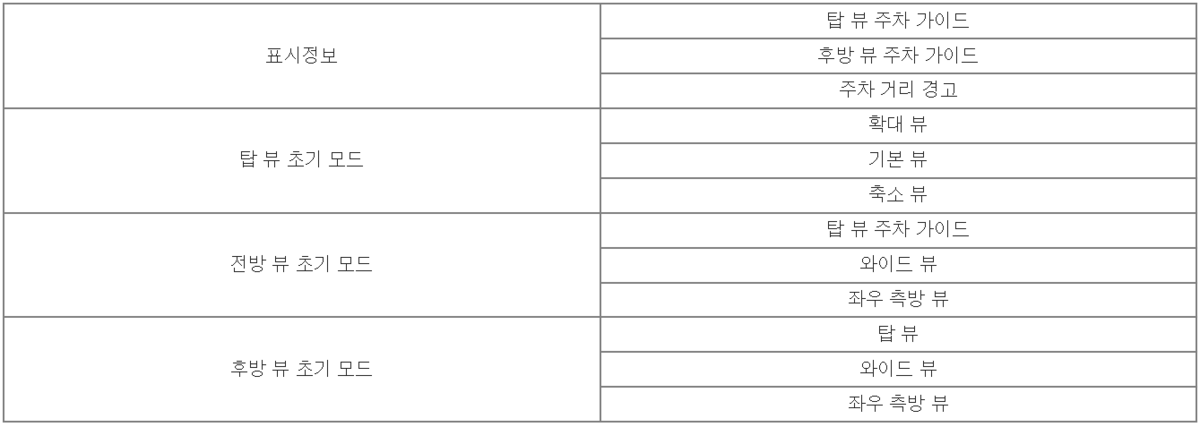
옵션을 변경하기 위한 윈도는(주차안내 설정) AVN(Audio · Video · Navigation)에서 표시하며 옵션 변경 사항만 캔 통신을 통해 SVM 제어기에 전달된다. 3가지 옵션은 사용자의 선택 직후 바로 적용되며 조건에 따라 표시되는 초기 뷰는 아래 표와 같다.
 이 시스템에는 후측방 모니터(Blind-Spot View Monitor-BVM)을 포함하고 있는데 이것은 차로 변경 시 사각 영역의 시야를 확보하기 위한 목적으로 실외 미러로 보이는 영역뿐만 아니라 실외 미러로 보이지 않는 사각영역까지 보여주는 주행 안전 시스템이다.
이 시스템에는 후측방 모니터(Blind-Spot View Monitor-BVM)을 포함하고 있는데 이것은 차로 변경 시 사각 영역의 시야를 확보하기 위한 목적으로 실외 미러로 보이는 영역뿐만 아니라 실외 미러로 보이지 않는 사각영역까지 보여주는 주행 안전 시스템이다.
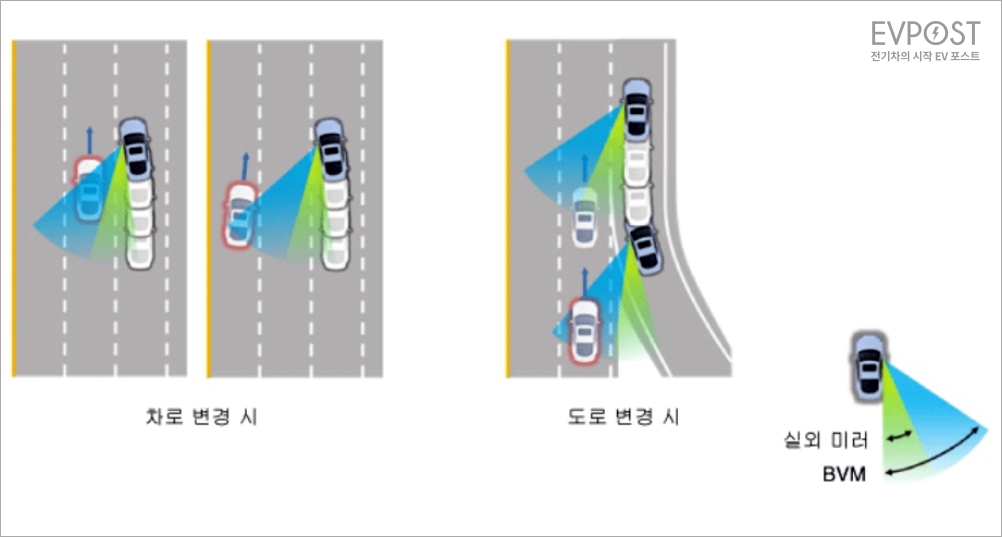

이 기능은 위의 그럼에서 보다시피 차량에 장착된 광각 카메라를 이용해 운전자가 방향제 시 등을 켜는 쪽의 후측방 영상을 계기판에 띄워 주는 기능이다. 아웃사이드 미러 대비 광각의 영상 제공을 통해 더 넓은 시야를 확보하여 더 안전한 운전을 도움을 준다.
이것의 상세한 주요 기능으로는 차량 주변 영상 표시 기능, 가이드라인 조향 연동 표시 기능, 전. 후방 근접 경보 표시 기능, 공차 보정 기능들이 있으며 유의사항으로는 아웃사이더 미러가 접혔을 경우, 영상은 출력이 되나 정상적인 사각영역이 아닐 수 있으며 좌/우 카메라의 원본 영상 외곽 부를 뷰 변환하여 클러스터에 표시하므로 SVM 영상에 비해 화질이 좋지 않을 수 있다.
또한 주간/일몰/일출/ 터널에 진입 시 터널 안 조명 상황에 따라 일시적으로 화면이 어두워질 수 있고 실외 미러와 비교해 주변 사물이 멀어 보인다.
| 서라운드 뷰(SVM) 시스템을 이루는 구성품
 서라운드 뷰를 구성하기 위해서는 위와 같은 구성품들이 필요한데 간단히 이야기 해 보면 전후좌우 카메라(4개)와 전방 후방에 설치된 초음파 센서의(8개) 영상 및 관련 정보들을 받아 SVM 유닛이 전반적인 작동을 제어하고 사용자의 네비게이션에(SVM 모니터) 표시하는 것이다. 이 시스템의 구성은 일반 사제품들도 존재하며 장착 가능하나 가격대도 상당하고 작업시간도 꽤 걸리는 편이다.
서라운드 뷰를 구성하기 위해서는 위와 같은 구성품들이 필요한데 간단히 이야기 해 보면 전후좌우 카메라(4개)와 전방 후방에 설치된 초음파 센서의(8개) 영상 및 관련 정보들을 받아 SVM 유닛이 전반적인 작동을 제어하고 사용자의 네비게이션에(SVM 모니터) 표시하는 것이다. 이 시스템의 구성은 일반 사제품들도 존재하며 장착 가능하나 가격대도 상당하고 작업시간도 꽤 걸리는 편이다.
![]() 마키님
마키님
전기차에 관심이 많은 코나 EV 유저




