지난 에피소드에서 자율주행차에 대한 정의와 분류에 대해서 간단히 알아봤습니다. 정의에서 자율주행차를 간단히 로봇이 운전하는 자동차라고 했습니다. 그럼 자율주행차는 어떻게 사람의 운전 능력을 대체할 수 있을까요? 이 궁금증을 이번 에피소드에서 소개해드릴까 합니다. 이번 시리즈의 취지에 맞게 너무 깊지 않게 가볍게 접근합니다.
(◍’◡’◍) 자, 출발할까요!
Ep1. 자율주행차라고 들어는 본 것 같다
Ep2. 자율주행차가 세상을 보는 방법은 여러가지이다
Ep3. 자동차가 사람을 믿지 못한다. 그래서 나서고 있다
Ep3 확장판. 테슬라 오토파일럿만 있는 것은 아니다
Ep4. 자동차 센서는 완전히 믿음을 주지 못한다
Ep5. 자율주행차는 나름 많은 생각을 하면서 운전한다
Ep6. 자율주행차가 도대체 어떻게 움직이는지 궁금하다
Ep7. 그런데 자율주행차만 있으면 안 된다
Ep8. 그래서 자율주행차가 우리에게 뭘 줄 수 있는데요?
들어가기
사람이 운전을 할 때는 5가지의 감각 중에서 4개를 사용한다고 합니다. 그 중 미각만 제외됩니다. 혹, 먹으면서 운전을 해야 잘 된다고 하시는 분도 계실 수 있지만…^^ 4가지 감각 중에서 가장 중요한 것은 바로 시각(See)입니다. 우선 눈으로 인지를 한 후에 운전에 필요한 행동을 한다고 보는 것이 맞을 것입니다. 청각도 때로는 중요한 역할을 합니다. 주변에서 들리는 긴급차량의 소리는 운전을 할 때 상황 판단에 중요한 역할을 하니까요.
우리의 눈에 해당하는 물건을 생각해보면 카메라(Camera)가 그 역할을 할 것 같습니다. 네, 자율주행차는 카메라가 필요합니다. 그럼 자동차에 카메라만 있으면 자율주행이 가능할까요? 물론 그런 자율주행차도 있습니다. 하지만 대부분의 자율주행차는 보다 더 안전한 운전을 위해 2가지 중요한 센서를 함께 사용합니다. 레이더(Radar)와 라이더(LiDAR) 가 그것입니다. 두 가지가 이름이 비슷하지요? 처음 접하신 분들은 그 헷갈릴 수 있습니다. 발음을 잘해야 합니다. ^^
카메라, 레이더, 라이더
이 세가지가 대표적인 센서입니다.
하지만 보통 자율주행차는 그 외에 3개 정도 센서가 더 있습니다. 하나는 청각의 역할을 할 수 있는 소나(Sonar) 또는 초음파(Ultrasound), 자동차의 위치 정보를 확인할 수 있는 GNSS(GPS)와 IMU 가 있습니다. 갑자기 영어를 써서 당황하셨지요. 그리고 센서는 아니지만 아주아주 중요한 한 가지인 HD 지도도 있습니다. 진짜 중요한 것입니다.

이제 각 센서별로 어떤 역할을
하는지에 대해서 알아보겠습니다.
카메라
(Camera)
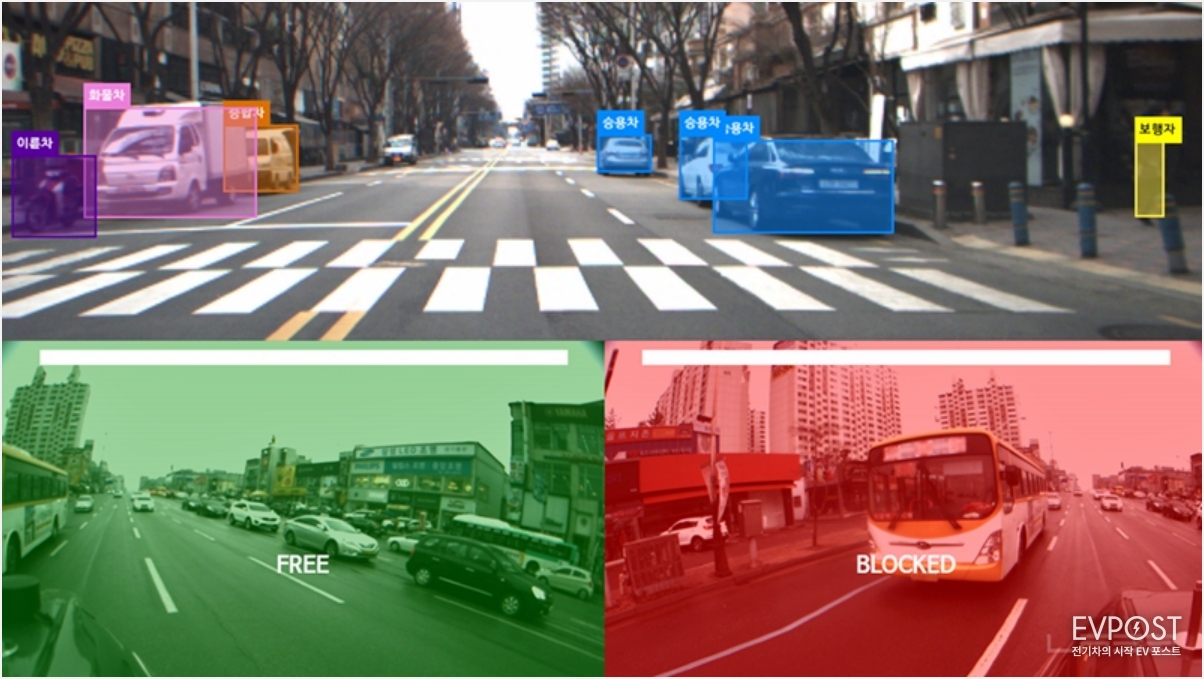
인간의 눈에 해당하는 센서로, 실시간 데이터 입력을 통해서 차량 외부의 시각 정보를 받아들입니다. 자율주행차를 위한 카메라는 기존의 화면을 그대로 받아드리는 것이 입력된 정보를 인공지능으로 통해 분석하는 능력이 필요합니다. 하지만 단점으로는 먼지 등 이물질이 큰 방해물입니다. 자율주행차의 발전에 가장 큰 역할을 해왔고, 하고 있고, 할 센서입니다.
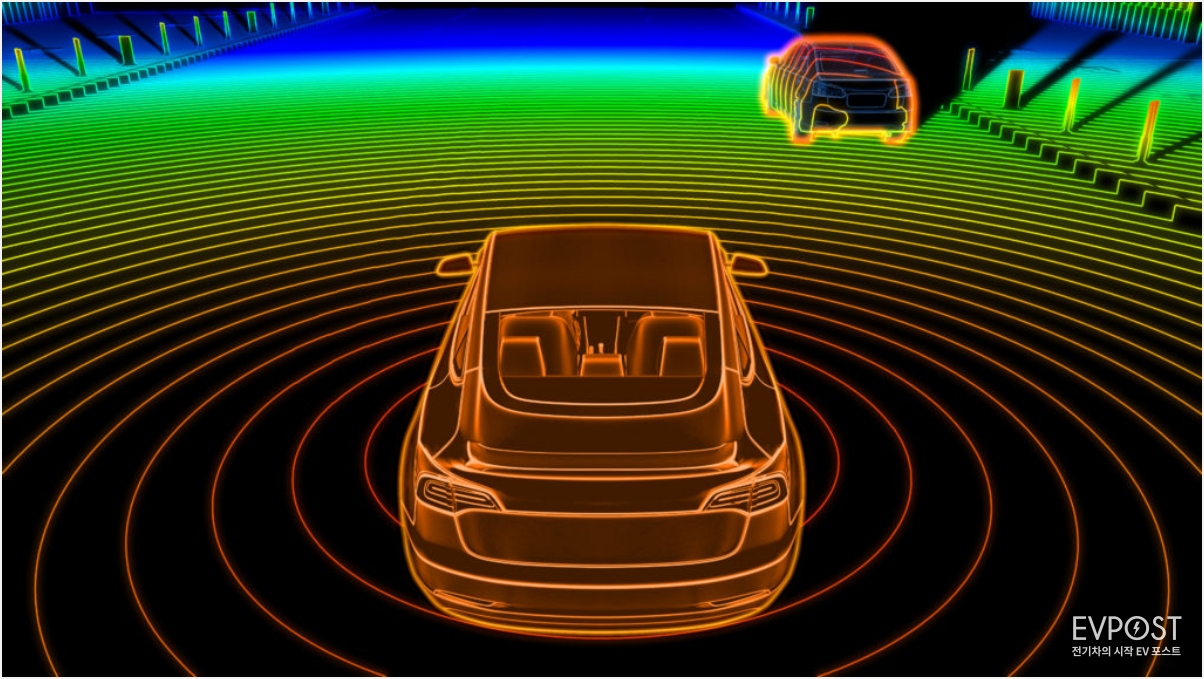
레이더
(Radar)
전자파 반사를 통해 주변 사물의 존재를 확인하는 센서로, 여러 전자파를 사방으로 발산합니다. 발산 어려운 말을 썼네요. 쉽게 쏜다는 표현으로 바꿀 수 있을 것 같습니다. 레이저 센서는 호수의 표면과도 같아서 특히 한정된 방향만을 바라볼 수 있기 때문에 일반적으로 조금씩 겹쳐지게 가로로 배열합니다. 자율주행차에서는 3대의 레이더 센서를 나란히 설치하면, 전방 180도 시야를 확보할 수 있습니다. 날씨 등에 영향을 받지 않고, 먼 거리에 있는 장애물의 존재를 확인할 수 있기 때문에 현재 운행 중인 자동차에도 많이 사용되는 센서입니다.

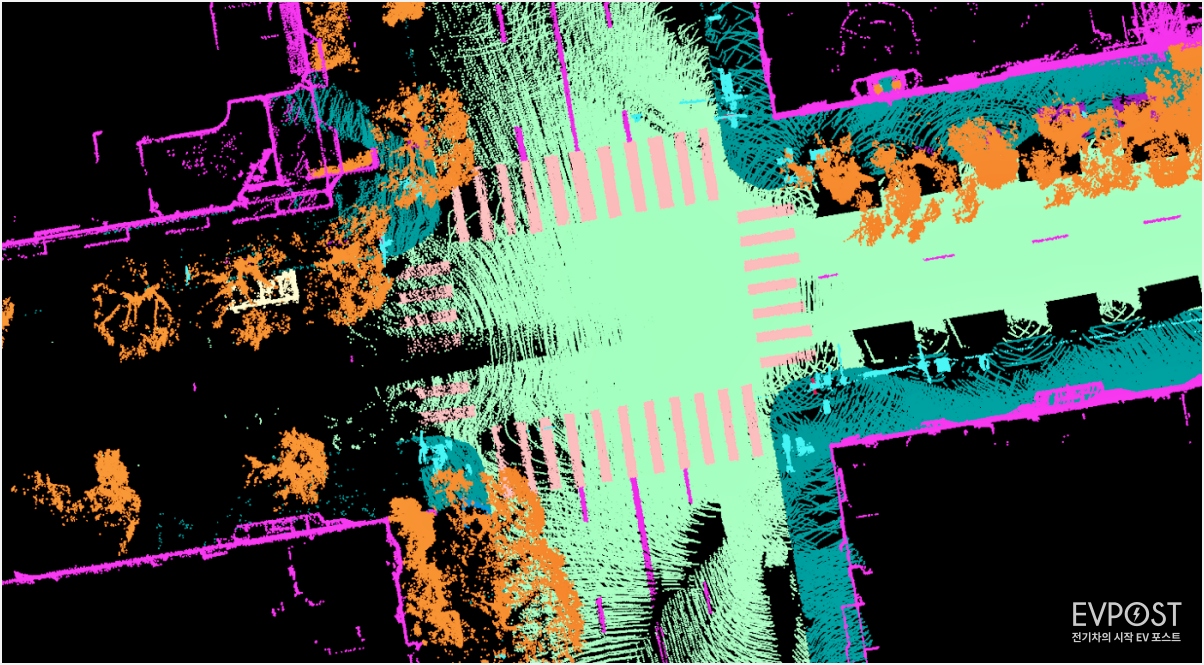
라이더
(LiDAR, LIght Detection And Ranging)
라이더는 처음 접하신 분도 계실 것 같습니다. Radar와 이름이 비슷한 것처럼 뭔가를 쏴서 외부정보를 확인할 수 있는 센서입니다. 단지 쏘는 것이 전자파가 아니라 레이저라는 것입니다. 이 레이저를 밖으로 스프레이와 같이 분사하고, 반사되어 다시 돌아오기까지 시간을 측정합니다. 그 결과를 가지고 주변의 물리적 환경에 대한 3차원 디지털 모형을 구현합니다. 이해가 어려우실 수도 있습니다. 조금 쉽게 레이더는 있다 없다 정도를 확인하고, 라이더는 주변 사물의 형상까지도 파악할 수 있습니다.
여기서 한 가지 재미있는 이야기를 하자면, 자율주행차의 기술적인 논쟁 중에 한가지인 라이더의 필요성에 대한 것이 있습니다. 그 논쟁에 가장 대표적인 곳이 바로 테슬라입니다. 테슬라의 Autopilot 은 라이더를 사용하지 않습니다. 카메라와 레이더로 주변을 인식하고 주행을 하고 있습니다. 자율주행차를 개발하는 많은 사람들, 특히 안전을 보다 더 강조하는, 은 라이더가 반드시 필요하다고 주장하고 있습니다.
이 논쟁에 대한 이유는 여러가지가 있겠지만, 가장 중요한 점은 경제적 이유가 있습니다. 360도의 주변을 확인할 수 있는 라이더의 경우는 보통 고급 승용차 값과 비슷한 것도 있습니다. 테슬라와 같이 자동차를 양산하는 기업 입장에서는 사용할 수 없는 부품인 것이지요. 이런 이유로 카메라를 이용하는 기술은 라이더와 같은 능력을 발휘하기 위해 노력하고, 라이더를 생산하는 기업은 가격을 낮추기 위한 노력을 진행 중에 있습니다. 하지만 결국에는 값싼 라이더를 장착하고, 향상된 카메라 인식 능력을 가진 자율주행차가 등장하게 되지 않을까 합니다.
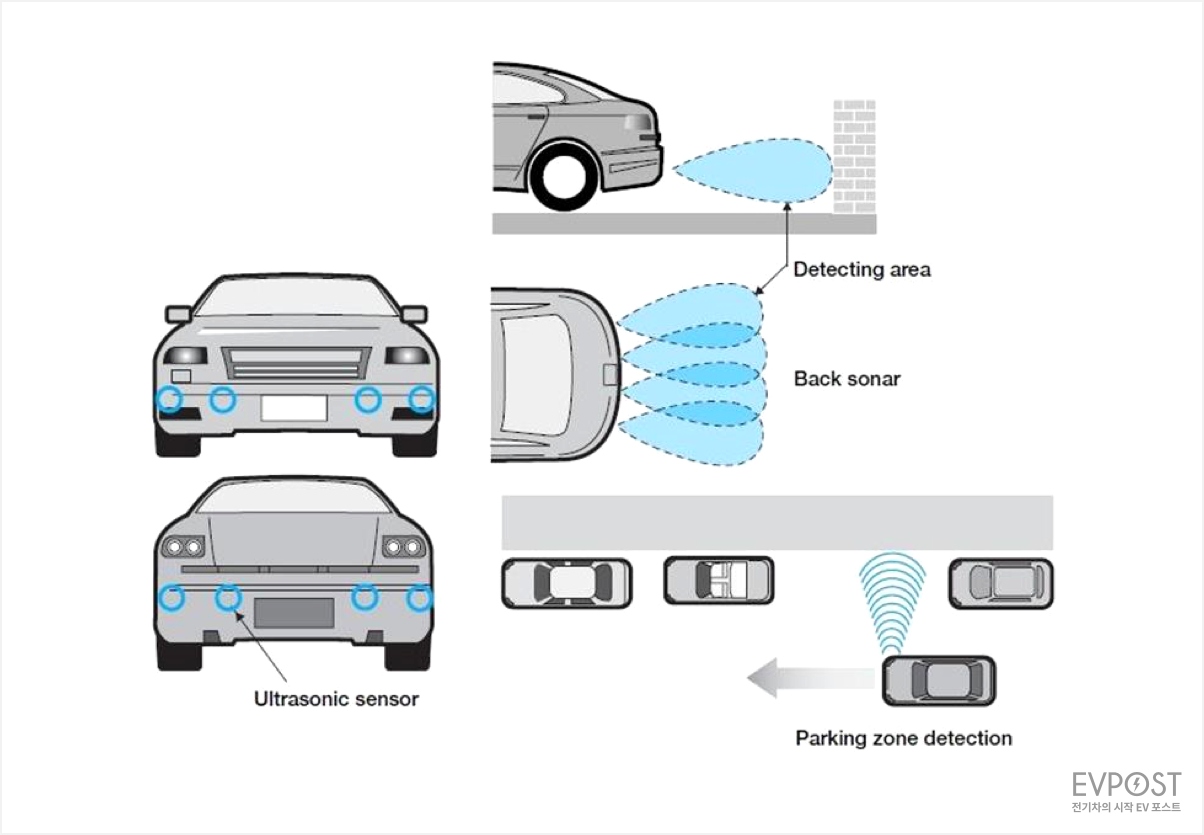
소나
(Sonar, Ultrasound)
소나는 레이더와 비슷하지만 전자파가 아닌 음파를 사용합니다. 음파는 전자파보다 훨씬 느린 속도로 진행하기 때문에, 작은 물체도 높은 해상도로 확인할 수 있습니다. 그러나 음파는 거리와 바람에 영향을 받기 때문에 비교적 가까운 범위 내에서만 추적할 수 있습니다. 우리가 알고 있는 자동차의 후방센서가 바로 그것입니다.
지금까지 자동차의 주변을 파악하기
위한 센서를 소개해드렸습니다.
이제 자율주행차가 자신이 지금 어디에
있는지에 대해서 알 수는 센서에
대해서 알아보겠습니다.
GNSS
(Global Navigation Satellite System)
GNSS는 흔히 GPS로 알려진 장치로 지구 상공에 있는 인공위성을 통해 위치를 파악할 수 있는 시스템을 말합니다. GPS는 미국에서 만든 시스템으로 우리나라에서 흔히 사용하는 것입니다. GNSS를 통해 현재 자율주행차가 지구의 어떤 위치에 있는지 파악합니다. 신호를 받을 수 있는 위성이 4대만 있으면 위치 계산을 할 수 있다고 합니다. 하지만 신호를 받지 못하는 환경에 있을 때는 정확한 위치 파악을 할 수 없다는 단점도 가지고 있습니다.
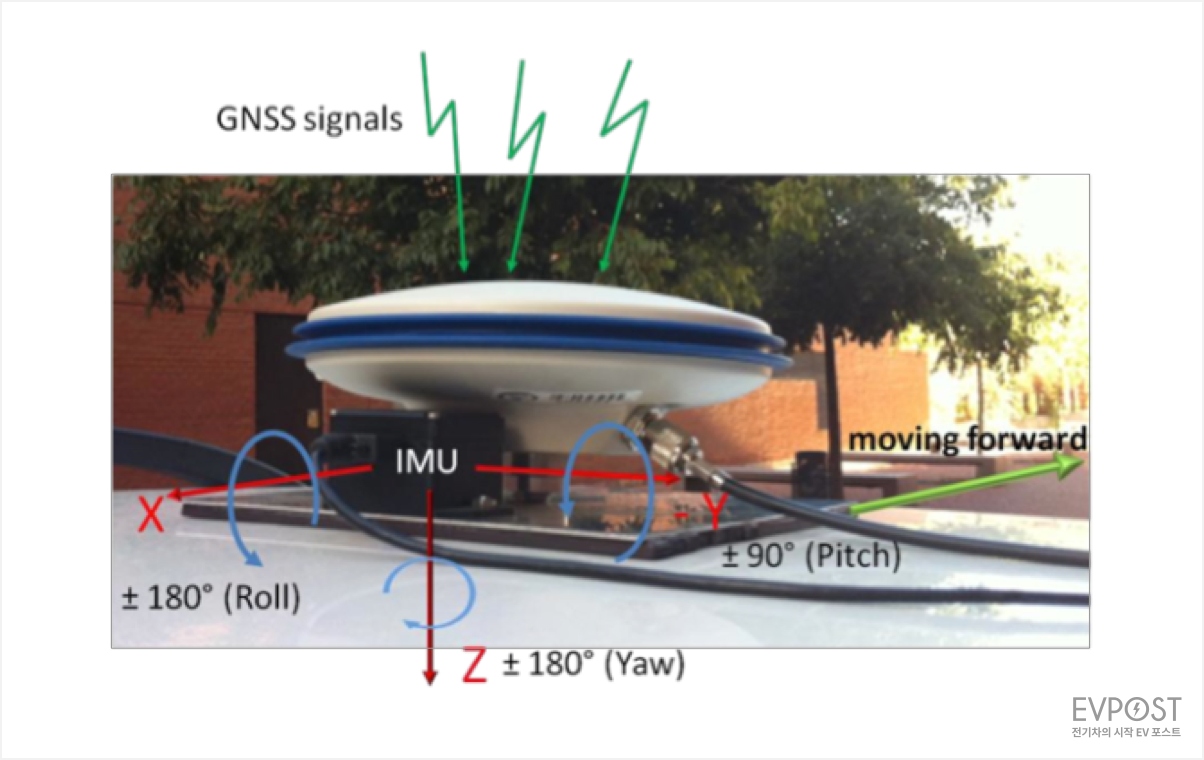
IMU
(Inertial Measurement Unit)
GNSS의 부정확성을 보완하고, 자동차가 지금 어느 방향을 향해 있는지 알려주는 장치입니다. 현재 IMU는 주행 거리계, 가속도계, 자이로스코프(gyroscope), 나침반 등 다양한 장비가 하나의 모듈로 만들어져 각각의 장비에서 나온 데이터를 조합하고, 정교한 측정 알고리즘을 통해 분석하는 기능을 포함하고 있습니다.
HD 지도
자율주행차는 HD 지도와 GPS 좌표를 참조하여 자신의 위치를 파악합니다. 특히 자율주행차용 HD 지도는 차선, 교차로, 공사 구간, 도로 표지판 등 도로나 교차로의 표면에 대한 세부적인 정보를 포함하고 있습니다. 지도는 단순히 자율주행차의 위치를 파악하는 것 이외도 운행에 필요한 경로를 결정할 때도 중요한 역할을 합니다.

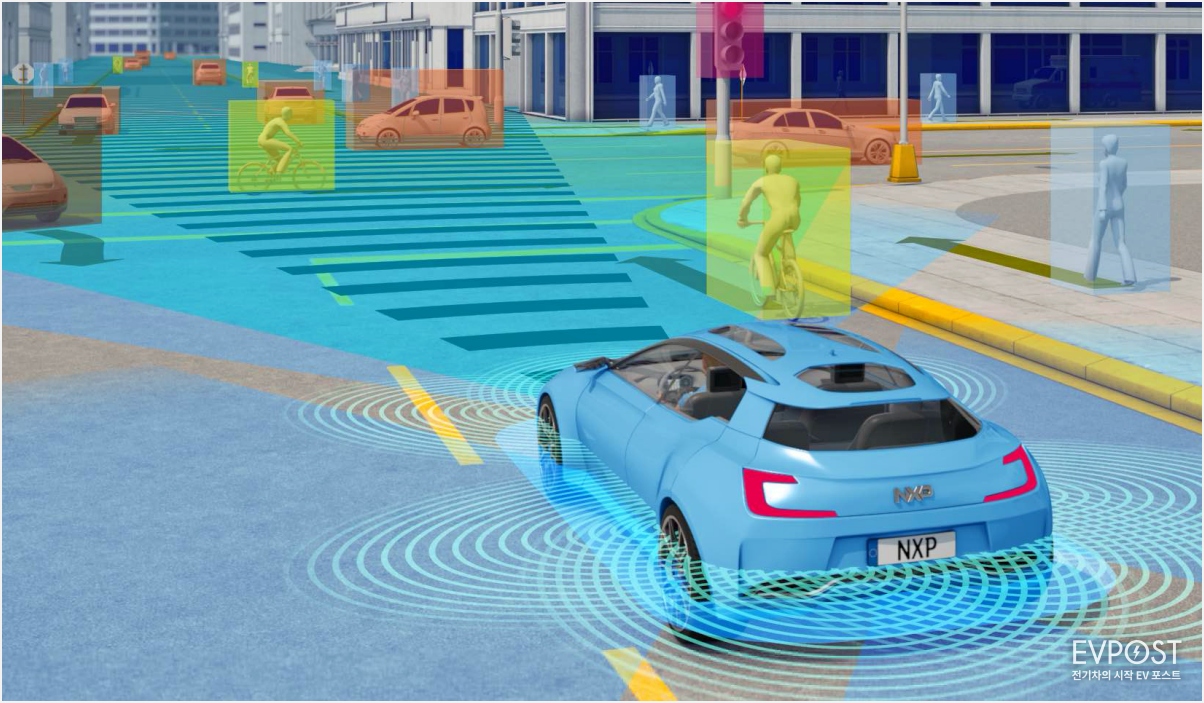
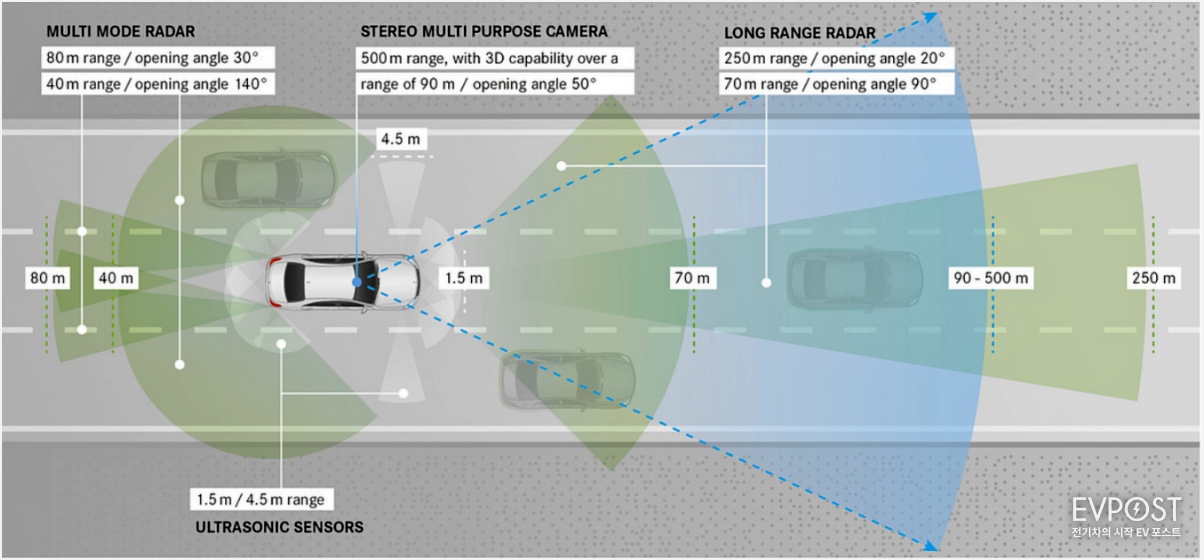
자율주행차는 이러한 센서들을 단순히 하나하나 개별적으로 처리를 하는 것이 아니라, 센서 퓨전(Sensor Fusion)이라는 센서들의 장점들을 조합해서 주변 상황을 인지하는 것에 놓치는 것을 최소화하기 위한 기술을 보통 사용하고 있습니다.
그리고 단순히 이러한 센서만 있다고 해서 자율주행차가 잘 운행을 할 수 있는 것이 아니라, 몇 개의 센서를 사용하고, 어떤 위치에 설치하는 것에 따라 그 능력을 극대화할 수 있습니다. 이러한 최적의 능력을 발휘하기 위해서 자율주행차를 개발하는 기업에서는 노력을 계속적으로 하고 있습니다.
나오기
지금까지 자율주행차에서 주변을 인지할 때 사용하는 센서와 자신의 위치를 파악하는 역할을 하는 것에 대해서 알아봤습니다. 한 마디로 사람의 시각 능력 하나를 대처하기 위해서 기계적으로 많은 장치가 필요합니다. 물론 각 센서 별로 다른 역할을 담당하고 있습니다. 결론적으로 이러한 것들은 모두 자율주행차가 보다 더 안전한 운전을 할 수 있도록 하기 위한 것들입니다.
그리고 이미 이런 센서들은 사람들의 오류(?)를 보완하기 위해서 도로 위에서 운행되고 있는 수많은 자동차에 장착되어 사람들을 도와주거나 경고를 해주고 있습니다. 다음 에피소드에서 그것에 대해서 알아보도록 하겠습니다.
Over the Vehicle !!!
 OTV
OTV
Over the Vehicle
자율주행차 그 이상의 가치




